Background
This has been a part that's always seemed like something fun to look at, well time to bring it to the front as I accquired a fix-er-upper Rampart PCB that was missing a few parts ( all the GAL's were in place tho' ) .
It's a 3 player trackball version missing one of the two Atari LETA chips on the board, part
#137304-2002.
So what the heck, it can't be that complex can it ? It's only a trackball controller should fit easily into a CPLD ?
What is does
The leta is the quadrature decoder, which is basically takes the two
outputs from a pair of the trackball sensors and turns them into a value.
Counting up when the trackball, or spinner, is moving in one direction and down
when moving in the opposite. I'm not going to go into the theory of quadrature
encoding but the basics are there are two inputs who's signals change approximately
90' apart from each other. When the CLK signal goes high before DIR the encoder
wheel is moving in one direction, when DIR goes high before CLK it's moving in
the opposite direction. This is the same theory as how a mouse works, and
there's lots of other folks who go into more depth on the subject if you want to
do further reading.
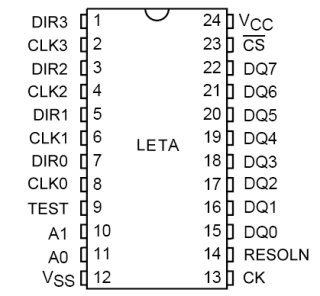
Pinout of the LETA
|
|
|
Testing a Leta
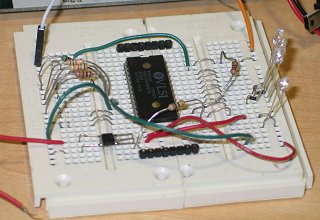
So first thing to do is pull a LETA from another board and put it into the patented test rig.
Complex stuff all LEDs and wires.This setup alows me to set the input states manually, clock the chip and visually examine the results.
 |